Network
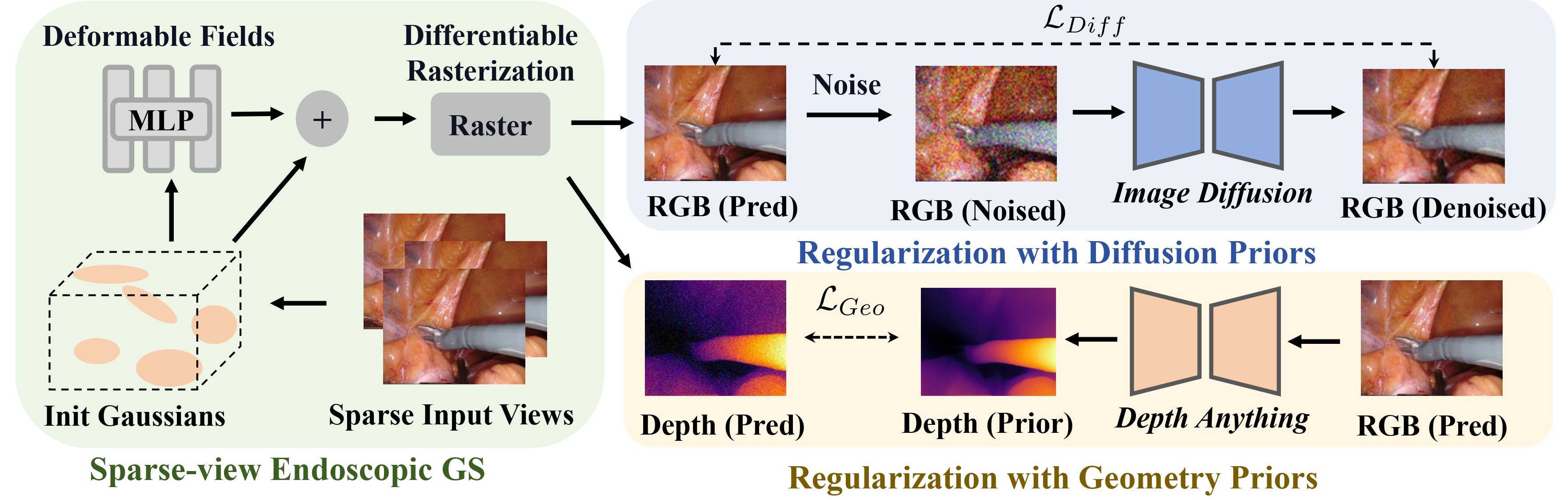
Overview of EndoSparse: Within a 3D-GS scene reconstruction framework, we incorporate vision foundation models as effective regularizers of the 3D scene.
We incorporate geometric prior knowledge from Depth-Anything and image appearance priors from Stable Diffusion, which provide valuable guidance signals for optimization at viewpoints without camera coverage.
Experimental Results
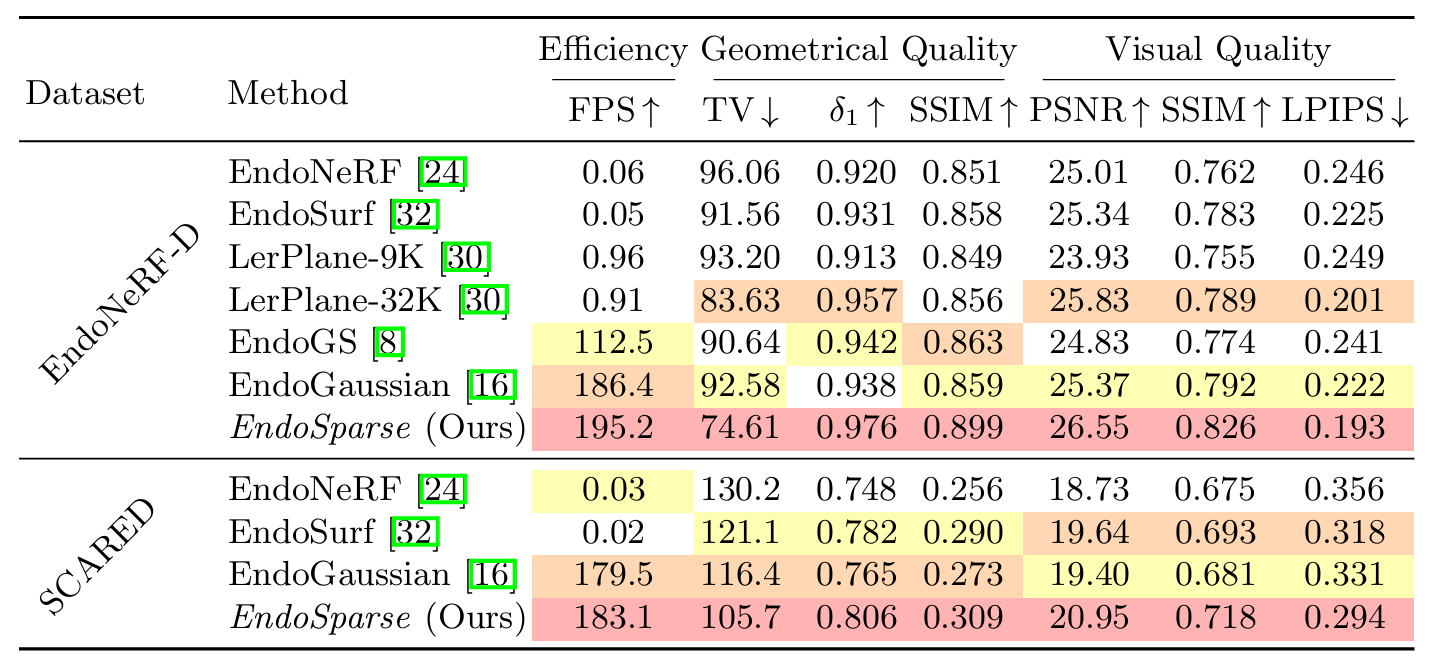
Quantitative Results
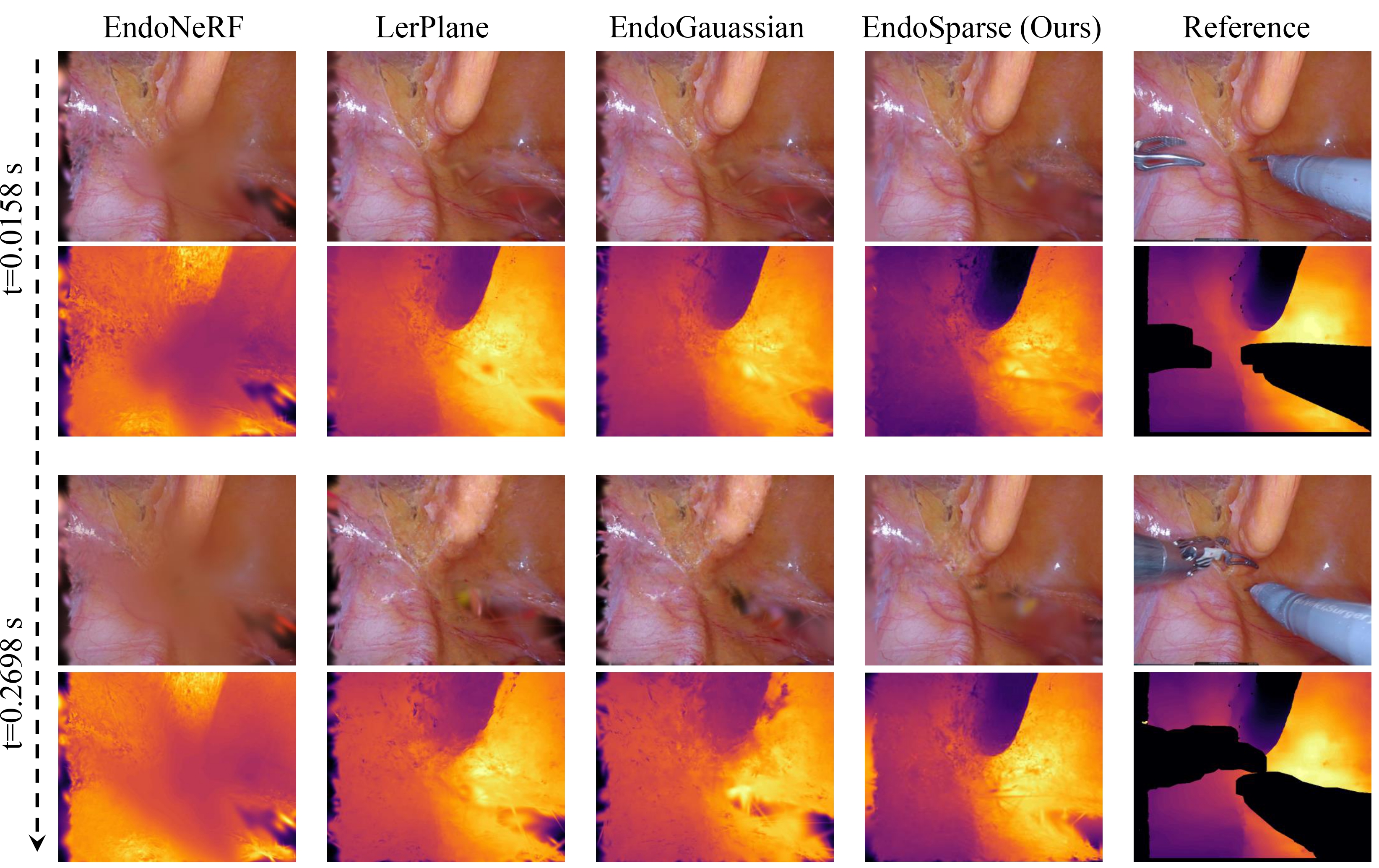
Qualitative Results
Citation
@article{li2024endosparse,
author = {Chenxin Li and Brandon Y. Feng and Yifan Liu and Hengyu Liu and Cheng Wang and Weihao Yu and Yixuan Yuan},
title = {EndoSparse: Real-Time Sparse View Synthesis of Endoscopic Scenes using Gaussian Splatting},
journal = {arXiv preprint},
year = {2024}
}
Relevant Works
EndoGaussian: Real-time Gaussian Splatting for Dynamic Endoscopic Scene Reconstruction
An intial exploration into real-time surgincal scene reconstruction built on 3D Gaussian Splatting.
LGS: A Light-weight 4D Gaussian Splatting for Efficient Surgical Scene Reconstruction
An initial investigation into memory-efficient surgical scene reconstruction achieves over 9X compression while preserving high visual quality and efficiency.
Endora: Video Generation Models as Endoscopy Simulators
A pioneering exploration into high-fidelity medical video generation on endoscopy scenes.
U-KAN Makes Strong Backbone for Medical Image Segmentation and Generation
An innovative enhancement of U-Net for medical image tasks using Kolmogorov-Arnold Network (KAN).